|
 |
  |
|
 |
||
|
|
||
 Darek
Darek
Sterowanie cyfrowe rotorem "CONRAD" lub podobnych np. AR-300, AR-303.
Rotory tego typu są obecnie najtańszymi rotorami na rynku dające możliwość obracania antenami na dachu. Niestety posiadają wadę, która powoduje, że dokładność ustawień po pewnym czasie pracy jest kiepska. Poza tym nie oferują precyzyjnego naprowadzania anteny na żądany kierunek. Przyczyną tego stanu rzeczy jest to, że rotory wykorzystują silniki synchroniczne (w rotorze i sterowniku) i bez żadnej kontroli zakładają że oba kręcą się w takim samym tempie (teoretycznie tak jest). Na rotorze jednak zawsze zainstalowana jest antena co powoduje bezwładność silnika rotora. Wolniej się rozpędza i hamuje co powoduje, że silniki się rozsynchronizowują. Trzeba co pewien czas synchronizować rotor z mechanicznym sterownikiem. Poza tym dokładność ustawienia anteny na żądaną pozycję też nie jest rewelacyjna.
Na rynku obecnie jest kilka dostępnych tego typu modeli rotorów. Z mojego doświadczenia wynika, że jedne (te lepsze) posiadają przekładnie ślimakową napędzającą rotor inne natomiast są wykonane w trochę inny sposób (bez przekładni ślimakowej). Moj projekt opiera się na rotorze bez przekładni ślimakowej, niemniej niewielka modyfikacja zamontowania impulsatora spowoduje, iż w innych rotorach będzie również można go zastosować.Tak właśnie narodziła się koncepcja przerobienia rotora, aby uzyskać większą dokładność ustawień.
Jeśli ten opis Cię zainteresuje zobacz też kolejny mój projekt "DAT". Tym razem całkowicie nowego sterownika rotora opartego na mikroprocesorze ATMEGA32.
Zaczynamy!
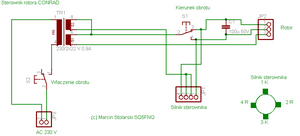
Schemat sterownika mechanicznego
Kliknij aby powiększyć
(opracowanie Marcina SQ5NFQ)Rotor musimy rozkręcić zaczynając od odkręcenia klapki (znajduje się pod spodem rotora) pod którą kyją się zaciski do podłączenia kabli.

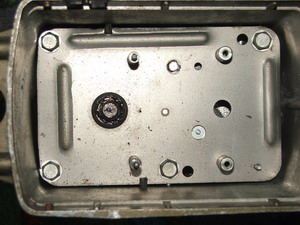
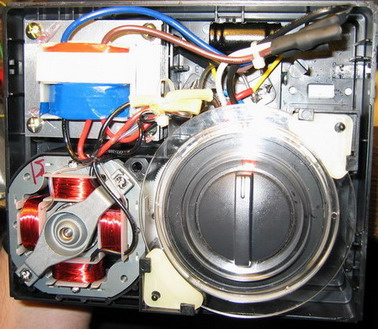
Widok rotora od środka.
Kliknij aby powiększyć.Nastepnie odkręcamy silnik i zdejmujemy listwę z zaciskami.(zabieg niekonieczny ale ułatwiający dalszą pracę)
Widok rotora od środka bez silnika.
Kliknij aby powiększyć.Teraz musimy odkręcić cztery śruby mocujące cały mechanizm rotora. W moim modelu rotora musiałem jeszcze dodatkowo roznitować dwa nity mocujące blachę do obudowy rotora. (Podczas rozwiercania należy uważać żeby wióry aluminiowe nie dostały się do zębatek) Po wykonaniu tych czynności dostaniemy się do serca rotora czyli wszystkich zębatek. Jak widać wszystkie są metalowe.

Widok zębatek rotora.
Kliknij aby powiększyć.

Widok głównej zębatki rotora.
Kliknij aby powiększyć.Pomysł polega na tym, aby po pierwsze wyeliminować sterownik mechaniczny i zastąpić go elektronicznym, a po drugie zastosować wewnątrz rotora czujnik obrotu (którego obecnie brak) czyli sprzężenie zwrotne.
Oryginalny sterownik mechaniczny
(którego już nie będziemy potrzebowali).Do sterowania użyłem sterownika stosowanego powszechnie w antenach satelitarnych Datcom AP500. Taki sterownik można bardzo tanio kupić na www.allegro.pl Cena jego waha się w granicach 15-30zł (stan na dzień 05.04.2006)

Widok sterownika AP500 (front).
Kliknij aby powiększyć.

Widok sterownika AP500 (front bez obudowy).
Kliknij aby powiększyć.

Widok sterownika AP500 (płytka).
Kliknij aby powiększyć.

Widok sterownika AP500 (przekaźniki).
Kliknij aby powiększyć.

Widok sterownika AP500 (mikroprocesor).
Kliknij aby powiększyć.

Widok sterownika AP500 (transformator).
[czerwone uzwojenie - 11,5V, żółte uzwojenie 28V]
Kliknij aby powiększyć.Sterownik trzeba poddać pewnym modyfikacją ponieważ dostosowany jest do sterowania silników prądu stałego a silnik w rotorze mamy na prąd zmienny. Modyfikacja ta polega na odłączeniu uzwojenia transformatora zasilającego silnik (żółtego) od płytki oraz przecięciu kliku ścieżek podłączonych do końcówek przekaźników. Zostawiamy jedynie ścieżki łączące elektronikę z cewkami przekaźników. Następnie trzeba wyprowadzić końcówki przekaźników na tył obudowy tak jak to widać na zdjęciach.
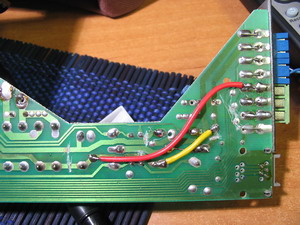
Widok przeciętych ścieżek.
Kliknij aby powiększyć.Ścieżki zakończone są złączami krawędziowymi aby łatwo dało się przyłączyć niezbędne okablowanie.
Napięcie sterujące nasz rotor uzyskamy z drugiego uzwojenia transformatora (żółte 28V) sterownika AP500, które podajemy bezpośrednio na styki przekaźników. One to teraz będą podawały odpowiednie napięcie do rotora. Dobrze jest obniżyć to napięcie do około 18V. Zrealizować to trzeba wykonując odczep na uzwojeniu. Zdjęcie przedstawia umiejscownienie odczepu.

Widok transformatora z wykonanym odczepem na uzwojeniu 28V.
Kliknij aby powiększyć.Silnik będzie się mniej grzał niż w przypadku jakbyśmy nie obniżali tego napięcia. Niemniej można bezpośrednio zasilić silnik napięciem 28V ale trzeba się liczyć z tym, iż długotrwała praca silnika może doprowadzić do spalenia uzwojeń stojana. Dodatkowo zainstalowałem diodę LED informującą o podawaniu napięcia na silnik rotora, którą zamontowałem na panelu frontowym sterownika AP500 w miejscu oznaczonym jako F1. Miejsce to w tym sterowniku jest puste i można to wykorzystać właśnie do tego celu. Użyłem dwukolorowej diody LED.
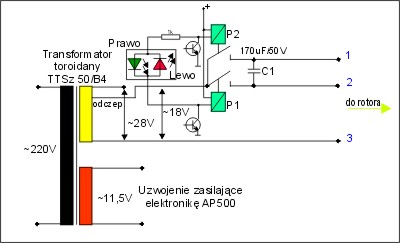
Schemat zasilania rotora przez sterownik AP500.
Kliknij aby powiekszyć.
Widok zamontowanej diody LED na panelu frontowym
sterownika AP500 podczas kręcenia rotorem.
Kliknij aby powiększyć.Rotor musimy rozkręcić i zamontować czujnik ruchu. Rozważałem różne metody pozyskiwania impulsów np. tarcza z nadrukowanymi kreskami i fotoelementy lub dziurawa tarcza od myszki i fotoelementy jak również magnesy, kontaktrony, halotrony itp. Wszystkie te rozwiązania są jak najbardziej dobre ale komplikują całą sytuację wprowadzając dodatkową elektronikę w rotorze. Jak wiadomo elektronika nie lubi warunków zewnętrznych i wystawiając ją na działnie czynników atmosferycznych może się zdarzyć że ulegnie uszkodzeniu. Ja wybrałem i zastosowałem jako czujnik silnik prądu stałego pozyskany z drukarki atramentowej (pomysł na takie wykonanie dostałem od Tomka SQ7FGV). Jest to proste a zarazem bardzo skuteczne rozwiązanie tego zagadnienia.

Widok silnika prądu stałego.
Kliknij aby powiększyć.Silnik trzeba poddać modyfikacją. W moim projekcie nie spełnia on roli silnika, będzie służył jako mechaniczny impulsator obrotowy. Silnik trzeba rozebrać aby dostać się do wirnika, komutatora i szczotek.

Widok silnika prądu stałego jako impulsatora.
Kliknij aby powiększyć.Następnie usuwamy uzwojenie wirnika ponieważ nie jest potrzebne. W miejscu podłączeń uzwojeń wirnika do komutatora robimy zworę. Dokładniej mówiąc zwieramy dwie ścieżki przeciwległe komutatora. To one będą głównym elementem dającym impulsy.

Widok silnika bez uzwojenia wirnika.
Kliknij aby powiększyć.

Widok komutatora i szczotek.
Kliknij aby powiększyć.Rozważałem również zastosowanie mniejszego silniczka pozyskanego z napędu CD-ROM od wysuwania szufladki ale jakość szczotek w tak małym silniczku nie napawa optymizmem. Biorąc to pod uwagę wybrałem większy i solidniejsze a tym samym bardziej niezawodny silniczek od drukarki.
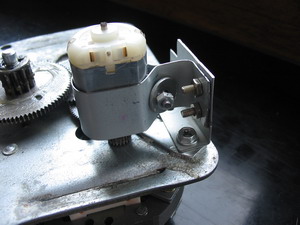
Teraz pozostaje tylko poskładać wszystko w całość i sprzęgnąć z zębatkami napędzającymi rotor. Moje wykonanie pokazałem na zdjęciach.

Widok zamontowanego impulsatora.
Kliknij aby powiększyć.
Widok zamontowanego impulsatora.
Kliknij aby powiększyć.
Impulsator zamontowany jest na sprężystej blaszce dociskającej jego zębatke do zębatki rotora.

Widok zamontowanego impulsatora.
Kliknij aby powiększyć.Jak widać na silniczku (impulsatorze) założona jest metalowa zębatka dobrze zazębiająca się z jedną z zębatek rotora. Można tutaj zastosować oczywiście plastikową zębatkę ale to rozwiązanie napewno będzie gorsze. Wszystkie zębatki rotora są metalowe i zastosowanie plastikowej zębatki mogłoby skończyć się po pewnym czasie jej zużyciem. Wszystkie nakrętki dobrze jest zabezpieczyć przed odkręcaniem się np. nakrętką kontrującą lub kapnąć kropelką kleju. Wszystkie zębatki przesmarowałem jeszcze smarem do łożysk.
Tak zamontowany impulsator daje około 3777 impulsów na 360 stopni obrotu głównej osi rotora. Daje to około 10,49 impulsu na jeden stopień. Rozdzielczość rotora w takim układzie wynosi około 0,1 stopnia. Muszę jednak podkreślić fakt, iż ciężko będzie ustawić rotor z krokiem 0,1 stopnia ponieważ uruchamiająć silnik rotora na ułamek sekundy wykonuje on 1 stopień obrotu. Wynika to z bezwładności układu mechanicznego. Nie piszę że się nie da ale jest to bardzo trudne do uzyskania. Niemniej podsumowując, sterownik odczytuje pozycję rotora z dokładnością 0,1 stopnia natomiast sterować rotorem da się bez problemu co 1 stopień. Dla mnie taka dokładność jest rewelacyjna!
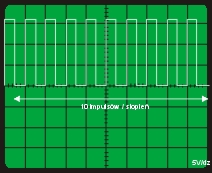
Widok ekranu oscyloskopu z przebiegiem z impulsatora.
Kliknij aby powiększyć.Jak dział sterownik z rotorem można zobaczyć na przykładowym fimiku. Rozmiar pliku około 4Mb w formacie Windows Media Player (*.wmv).
Pobierz filmik.Niestety zastosowanie większego silniczka (impulsatora) wiąże się z koniecznością modyfikacji obudowy rotora. Impulsator nie mieści się w przestrzeni miedzy mechanizmem rotora a obudową. Konieczne jest wycięcie w górnej części obudowy rotora otworu w który wejdzie cześć tylnia impulsatora.

Widok otworu na impulsator.
Kliknij aby powiększyć.

Widok otworu na impulsator od spodu.
Kliknij aby powiększyć.Następnie trzeba wykonać nadbudówkę, która ponownie zamknie szczelnie całą obudowę rotora.

Widok nadbudówki.
Kliknij aby powiększyć.Nadbudówkę wykonałem z blachy stalowej 0,5mm uformowanej w kształcie prostokątnego pudełeczka, które nastepnie przykleiłem szczelnie klejem do metalu (tzw. spawanie na zimno firmy JBWELD) do obudowy rotora. Później po wyschnięciu dodatkowo od środka zabezpieczyłem silikonem. Kolejny krok to pomalowanie nadbudówki farbą olejną aby nie zardzewiała.

Widok pomalowanej nadbudówki.
Kliknij aby powiększyć.Sterownik AP500 ma możliwość sterowania ręcznego (lewo-prawo) oraz półautomatycznego (wybór pozycji z 80 pamięci). Sterowanie to odbywa się poprzez 4 przyciski na panelu frontowym. Jednak sterowanie nimi nie jest zbytnio wygodne na dłuższą metę ze względu na to iż są to malutkie mikroprzełączniki. Poza tym sterownik ma na panelu frontowym klapkę przyciemniającą aby ładnie wyglądały cyfry na wyświetlaczu i ciągłe otwieranie i zamykanie jej też nie było by wygodne. Dla swojej wygody zastosowałem przerobioną mysz komputerową za pomocą której w bardzo wygodny sposób można bez problemu sterować wszystkimi funkcjami sterownika.

Widok zastosowanej myszki A4Tech WWW-11.
Kliknij aby powiększyć.Patrząc od lewej przycisk pod kciukiem ma przypisaną funkcję MEMORY, dalej pierwszy z lewej to lewe obroty, potem środkowy klawisz to SET i ostatni to prawe obroty. Mysz nie jest już typową myszą komputerową i pod żadnym pozorem nie należy jej podłączać do komputera. Wykorzystałem w niej jedynie przełączniki a resztę elektroniki odłączyłem bo jest mi nie potrzebna.

Widok przerobionej płytki myszki.
Kliknij aby powiększyć.Do przełączników w sumie podłączonych jest 5 kabelków, które dalej lecą już kabelkiem od myszki do sterownika przez wtyczkę i gniazdo PS2. Gniazdo to jest zamontowana na tylnim panelu sterownika.
Widok wtyczki i gniazda PS2.
Kliknij aby powiększyć.

Widok gniazda PS2 na panelu tylnim sterownika.
Kliknij aby powiększyć.Gniazdo natomiast jest podłączone w sterowniku pod przyciski na panelu frontowym.

Widok podłączenia myszy.
Kliknij aby powiększyć.Można również tymi funkcjami sterować za pomocą pilota od tunera satelitarnego. Koszt zakupu takiego pilota nie przekracza 10zł. Jest również możliwe sterowanie go z komputera poprzez port (TUNER) zainstalowany na tylnej ściance.

Widok ścianki tylnej AP500.
Kliknij aby powiększyć.
Aby można było przesyłać dane między komputerem a sterownikiem trzeba najpierw wykonać konwerter. Konwerter ma służyć do transmisji danych magistralą I2C.
Niemniej na dzień dzisiejszy nie jestem w stanie zdobyć informacje jakie dane słać do sterownika aby móc nim sterować. Jeśli ktoś z Was ma takie informacje i chce się podzielić nimi ze mną to na bazie tych danych powstałby program na PC sterujący tym sterownikiem. Za wszelkie informację na temat transmisji będę bardzo wdzięczny. Info proszę na maila
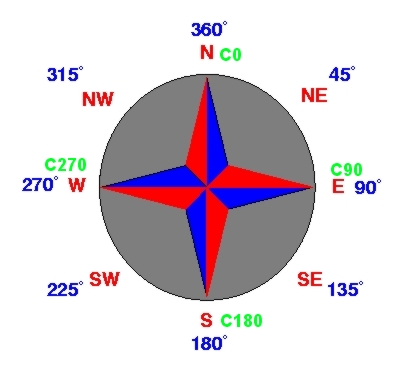
Sterownik ma możliwość elektronicznego kontrolowania zakresów obrotu anteny czyli tzw. krańcowe wartości obrotu jakie antena może zrobić, które ustala się samodzielnie.Od tego właśnie zaczynamy programowanie naszego sterownika. Wchodzimy w ustawienia przytrzymująć klawisz "S" na sterowniku kilka sekund a następnie wciskamy klawisz "M". Wybieramy Fn-1 i ustawiamy dolny zakres obrotu naszego rotora. U mnie ta wartość wynosi 4150. Należy pamiętać, iż dolny zakres musi być większy od 100. Nastepnie zatwierdzamy klawiszem "M". Wybieramy Fn-2 i ustawiamy analogicznie górny zakres obrotu. Tu należy pamiętać aby górny zakres nie przekroczył 8000! Po tych czynnościach sterownik jest gotów do dalszego programowania pamięci. Ja narazie do testów wprowadziłem sobie 4 komórki pamięci. Obróciłem rotor na północ i zapisałem wartość pokazanych impulsów do pamięci (C0). Potem obróciłem rotor na wschód i pokazaną wartość impulsów wprowadziłem do pamięci C90. Analogicznie postąpiłem z południem (C180) oraz z zachodem (C270). Jak widać wprowadzam pozycję anteny np. kąt 90 stopni do pamięci C90, czyli nr. komórki pamięci oznacza wartość kąta obrotu. Teraz mam zaprogramowaną pamięć w następujący sposób:
Opis Pamięć
nr. impulsu
Dolny zakres obrotu L1
4150
Górny zakres obrotu L2
7927
Północ C0
4150
Wschód C90
5094
Południe C180
6038
Zachód C270
6982
Opis Kąt Imp. Północ 0 4150 Opis Kąt Imp. Opis Kąt Imp. Opis Kąt Imp. 1 4160 91 5104 181 6048 271 6993 2 4170 92 5115 182 6059 272 7003 3 4181 93 5125 183 6069 273 7014 4 4191 94 5136 184 6080 274 7024 5 4202 95 5146 185 6090 275 7035 6 4212 96 5157 186 6101 276 7045 7 4223 97 5167 187 6111 277 7056 8 4233 98 5178 188 6122 278 7066 9 4244 99 5188 189 6132 279 7077 10 4254 100 5199 190 6143 280 7087 11 4265 101 5209 191 6153 281 7098 12 4275 102 5220 192 6164 282 7108 13 4286 103 5230 193 6174 283 7119 14 4296 104 5241 194 6185 284 7129 15 4307 105 5251 195 6195 285 7140 16 4317 106 5262 196 6206 286 7150 17 4328 107 5272 197 6216 287 7161 18 4338 108 5283 198 6227 288 7171 19 4349 109 5293 199 6237 289 7182 20 4359 110 5304 200 6248 290 7192 21 4370 111 5314 201 6258 291 7203 22 4380 112 5325 202 6269 292 7213 23 4391 113 5335 203 6279 293 7224 24 4401 114 5346 204 6290 294 7234 25 4412 115 5356 205 6300 295 7245 26 4422 116 5367 206 6311 296 7255 27 4433 117 5377 207 6321 297 7266 28 4443 118 5388 208 6332 298 7276 29 4454 119 5398 209 6342 299 7287 30 4464 120 5409 210 6353 300 7297 31 4475 121 5419 211 6363 301 7307 32 4485 122 5429 212 6374 302 7318 33 4496 123 5440 213 6384 303 7328 34 4506 124 5450 214 6395 304 7339 35 4517 125 5461 215 6405 305 7349 36 4527 126 5471 216 6416 306 7360 37 4538 127 5482 217 6426 307 7370 38 4548 128 5492 218 6437 308 7381 39 4559 129 5503 219 6447 309 7391 40 4569 130 5513 220 6458 310 7402 41 4580 131 5524 221 6468 311 7412 42 4590 132 5534 222 6479 312 7423 43 4601 133 5545 223 6489 313 7433 44 4611 134 5555 224 6500 314 7444 45 4622 135 5566 225 6510 315 7454 46 4632 136 5576 226 6521 316 7465 47 4643 137 5587 227 6531 317 7475 48 4653 138 5597 228 6542 318 7486 49 4664 139 5608 229 6552 319 7496 50 4674 140 5618 230 6563 320 7507 51 4685 141 5629 231 6573 321 7517 52 4695 142 5639 232 6584 322 7528 53 4706 143 5650 233 6594 323 7538 54 4716 144 5660 234 6605 324 7549 55 4727 145 5671 235 6615 325 7559 56 4737 146 5681 236 6626 326 7570 57 4748 147 5692 237 6636 327 7580 58 4758 148 5702 238 6647 328 7591 59 4769 149 5713 239 6657 329 7601 60 4779 150 5723 240 6668 330 7612 61 4789 151 5734 241 6678 331 7622 62 4800 152 5744 242 6688 332 7633 63 4810 153 5755 243 6699 333 7643 64 4821 154 5765 244 6709 334 7654 65 4831 155 5776 245 6720 335 7664 66 4842 156 5786 246 6730 336 7675 67 4852 157 5797 247 6741 337 7685 68 4863 158 5807 248 6751 338 7696 69 4873 159 5818 249 6762 339 7706 70 4884 160 5828 250 6772 340 7717 71 4894 161 5839 251 6783 341 7727 72 4905 162 5849 252 6793 342 7738 73 4915 163 5860 253 6804 343 7748 74 4926 164 5870 254 6814 344 7759 75 4936 165 5881 255 6825 345 7769 76 4947 166 5891 256 6835 346 7780 77 4957 167 5902 257 6846 347 7790 78 4968 168 5912 258 6856 348 7801 79 4978 169 5923 259 6867 349 7811 80 4989 170 5933 260 6877 350 7822 81 4999 171 5944 261 6888 351 7832 82 5010 172 5954 262 6898 352 7843 83 5020 173 5965 263 6909 353 7853 84 5031 174 5975 264 6919 354 7864 85 5041 175 5986 265 6930 355 7874 86 5052 176 5996 266 6940 356 7885 87 5062 177 6007 267 6951 357 7895 88 5073 178 6017 268 6961 358 7906 89 5083 179 6028 269 6972 359 7916 Wschód 90 5094 Południe 180 6038 Zachód 270 6982 Północ 360 7927 Tabela pozwalajaca w prosty sposób zaprogramować sterownik.
Jeśli ktoś z Was ma inne zakresy obrotu albo inną ilość impulsów na stopień obrotu to udostępniam plik Excela (arkusz kalkulacyjny) pozwalający na szybkie przeliczenie impulsów na kąty. Plik do pobrania tutaj Podkreślam jeszcze raz aby górna liczba impulsów nie przekroczyła 8000, ponieważ jeśli przekroczy tą wartość to nie wpiszemy jej do pamięci sterownika. Wynika to z danych technicznych sterownika.
Jednocześnie możemy wprowadzić 80 komórek pamięci w dowolny wygodny dla nas sposób.
Całą oryginalną instrukcję obsługi sterownika można pobrać tutaj.
C.D.N ...
Czekam na Wasze propozycje jak wykonać sterowanie z PC tego sterownika.

)
)
)
)
)


)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
![]()
Wszelkie
prawa zastrzeżone.
Strona zoptymalizowana do rozdzielczości 1024x768 i wyższej.